![]()
A comparative analysis on the performance of universal motor when driven by alternating current/direct current
I. A. Araga1*, A. E. Airoboman1, A. P. Inalegwu2, I. A. Afolayan1, F. O. Adunola1
1Department of Electrical/Electronic Engineering, Nigerian Defence Academy Kaduna, Nigeria, 2Energy Commission of Nigeria, Nigeria
ABSTRACT
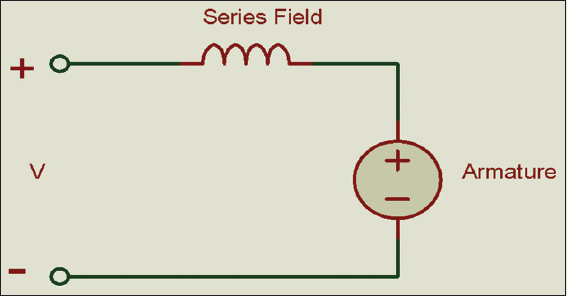
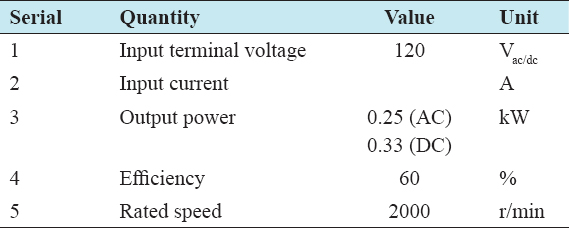
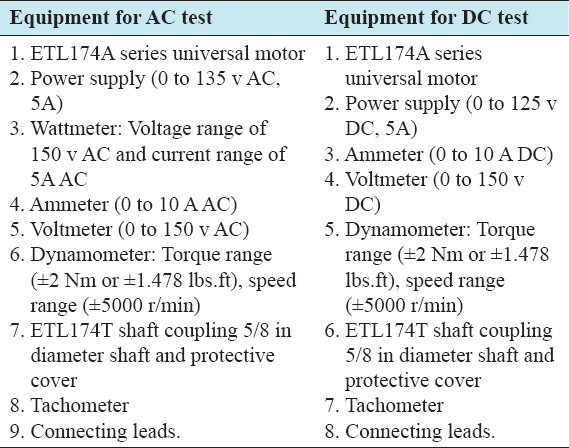
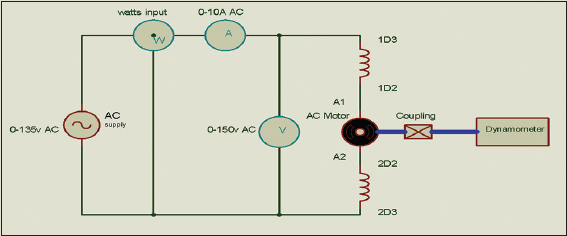
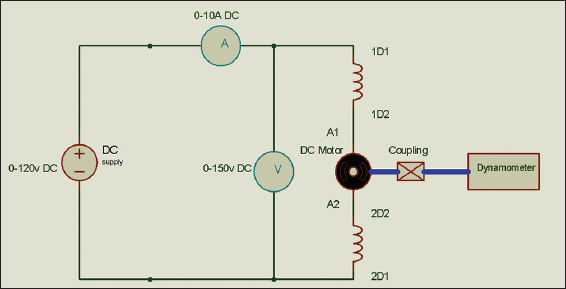
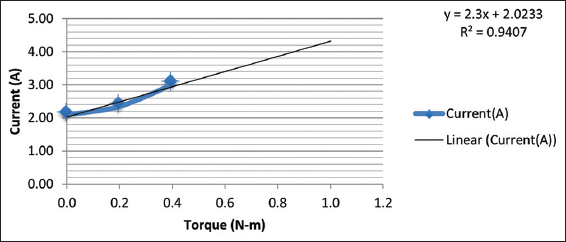
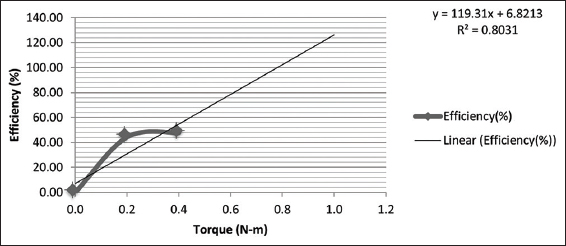
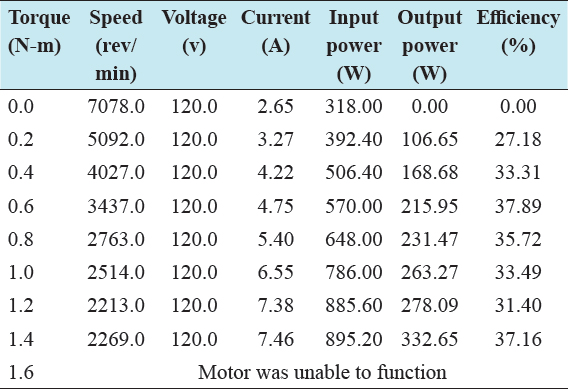
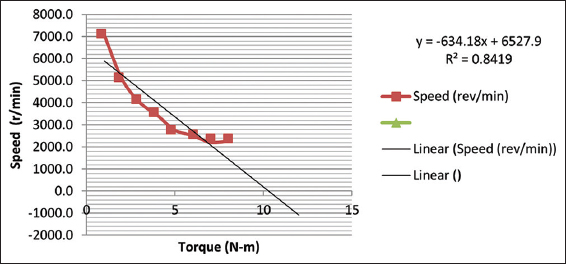
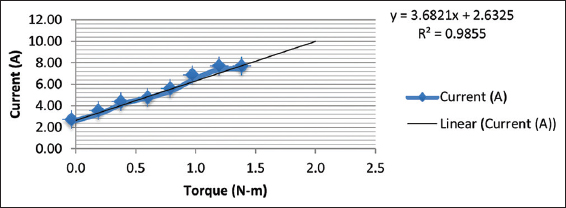
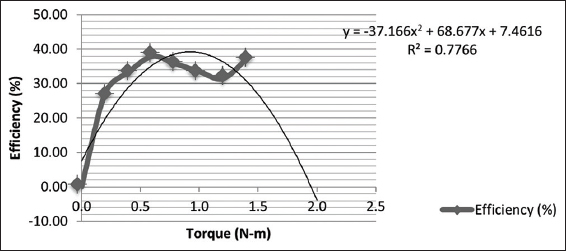
The aim of this paper is to investigate and compare the operating characteristics performance of a series universal motor (UM) when it is operating as an alternating current (AC) motor and as a direct current (DC) motor. The scope of the experiment was, therefore, limited to testing the series UM to study its behavior under each condition (AC and DC). The characteristics of the motor required to be investigated, under each of the test conditions, included speed, current drawn, and its efficiency in relation to various load setting. A laboratory experiment was carried out on an ETL174A model of series UM with a rated power of 0.25 kW by connecting the motor to an AC voltage source to carry out the AC test. Second, the motor was then connected to a DC supply to perform a DC test. In both cases, the load setting was adjusted so that the corresponding speed, current, and input power were measured. In addition, the output power and resultant efficiencies were determined through mathematical analysis. Results obtained were interpreted graphically to show the speed-torque, current-torque, and efficiency-torque characteristics for both the AC and DC test. The results further show that the operating characteristics of the ETL174A model series UM can operate both on AC and DC supply and that the behavior of the motor followed the same trends in each case, however, with differences in magnitudes of the quantities considered. Peak efficiency of approximately 42.7% and 37.9% was recorded when the UM ran under AC and DC supply, respectively. Furthermore, it was observed from the experiment that the speed (7080 rev/min) of the UM under DC no-load condition was far greater than the speed (5320 rev/min) under AC no-load condition. Conclusively, the deviation between results obtained during experiment and the expected results from literature did not alter the operating principle of the UM.
Keywords: Alternating current, direct current, experiment, load, universal motor