INTRODUCTION
Developing technology is witnessing an increase on demand for applications that do useful to human such as finding people or a robot in a hotel service. These techniques may need working indoor because global positioning system cannot deliver accurate position because it needs a line of sight with three orbiting positioning satellites.[1,2] Fingerprinting localization algorithm depends on its classification function; it also known for its reliability, compared to other ranging techniques such as time of arrival[3] and angle of arrival[4] needs special dedicated hardware for measurements. Received signal strength indicator (RSSI) technique relies only on strength of received signal. RSSI equipped by radio sets, but it adds difficulty in measuring signal propagation because they are difficult to predict due to multipath components effect,[5] thus trilateration is not a choice to indoor localization.[6,7] Fingerprinting brings acceptable results; RSSI measured in predefined spots within targeted region.[8] Furthermore, choosing classification algorithm with fingerprinting approach will affect results accuracy. The artificial intelligence (AI) approach makes localization with wireless fingerprinting adaptable.
Researchers investigated the indoor localization system, some of these are proposing a new techniques such as in Pohl and Noack[9] that use probabilistic neural network to decide between two generalized regression neural network (GRNN) measurements to obtain accuracy about 0.58 m. While Zou et al.[10] got 0.7782m average error by the GRNN Using Particle Swarm Optimization (PSO-GRNN). On the other hand, Koyunchu[11] earned average error 0.65m from GRNN. An enhancement to the GRNN done by Xu et al.[12] with improved digital filter to bring mean error about 1.8 m.
Therefore, GRNN function which accepts correlated (RSSI) readings is an important feature used to verify how much improvement done it will be compared with known methods in literature, i.e., weighted KNN (WKNN) approaches. Finally, experimental results show its best at 0.0461 m.
Rest of paper as follows: Section 2 talks about the theoretical background, section 3 describes the experiment, while section 4 shows the results and finally conclusions in section 5.
THEORETICAL BACKGROUND
Signal Propagation Model
Measured signal strength subjected to log-normal shadowing model equation 1, where (n) is path loss exponent and (A) is 1 m reference RSSI. Random spread of wireless signal results from walls and obstacles multipath effect. Indoor wireless signal is unpredictable and difficult modeling mathematically. However, it remains static in each position unless environment changed such as moving objects. RSSI group from a certain beacons number forming a unique set known as finger. A combination of fingers resulting fingerprinting algorithm.

Fingerprinting Algorithm
It is known as scene analysis shows an acceptable performance with random variation of signal propagation. Fingerprinting consists of two phases; offline phase Figure 1a getting measured RSSI with their x and y coordinates. Online phase Figure 1b gets RSSI in real-time and compares it with the stored database for position estimation. Several classification algorithms estimating positions such as WKNN, particle filter, Bayesian classification model, fuzzy c-means, and neural network.[13]
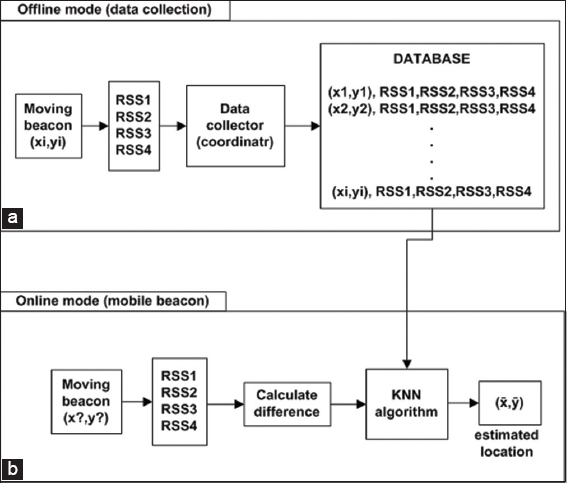
Figure 1: Fingerprinting (a) offline mode and (b) online mode
WKNN Algorithm
WKNN is a classification method gives close points more weight in calculations, it uses Euclidean distance Equation 2 as a weight and distance metric

Weight calculated according to Equation 3 below

Where, d0 is a small number preventing division by zero when some points get its identical position.
Estimated location will be the centroid (XE, YE) in Equations 4 and 5 and estimated error is the Euclidean distance between real and estimated points Equation 6.



K obtained empirically by measuring minimum mean square error between estimated and real-time points, a special case when K=1 is the first nearest neighbor algorithm, which brings less accuracy often.[14] It is worth to say that increasing K value not necessarily brings localization accuracy because estimated point may diverge since far points will contribute in estimation.[15]
ZigBee
ZigBee is a standard-based network protocol that layered on the top of IEEE 802.15.4 medium access layer and physical layer.[16] ZigBee network is an inexpensive low rate wireless personal area network chosen for its cost-effectiveness, low-power consumption, and applicable topologies,[17] as well as its ability measuring signal strength of last received packets.[18]
GRNN
It is neural network provides a smooth transition from observed value to another used for any regression problem,[19] in which an assumption of linearity not justified such as correlated RSSI readings from beacons in this research. GRNN used for function approximation and regression by fingerprinting algorithm using MATLAB neural network toolbox. GRNN has advantage of learning in one pass through data, generalized from examples as soon as they stored and converges to conditional mean regression surface as more examples viewed and gets away from poor solutions exist in local minima of error (compared to iterative neural networks methods).[20]
EXPERIMENT
Experimental setup is done by placing four ZigBee routers as anchors in corners within a target region of 2.1 m×2.7 m. Mobile beacon configured as ZigBee router moving while broadcast packets. The four corner anchors are also ZigBee routers, they receive packets from beacon then measure and forward the received signal strength value to the coordinator as a sink in a round-robin fashion[21] (Figure 2). During offline phase measurements taken in 15 cm grid resolution, online phase will be the RSSI obtained during mobile beacon movement subjected to compare both WKNN and GRNN (Figure 3). The same experiment repeated in 30 cm resolution to see the effect of increasing resolution on GRNN algorithm. Base value in GRNN chosen using MATLAB optimization toolbox (each x and y coordinates of mobile beacon a base value existed to increase the regression results accuracy). Channel 25 used to avoid interference with WiFi transmission.[22]
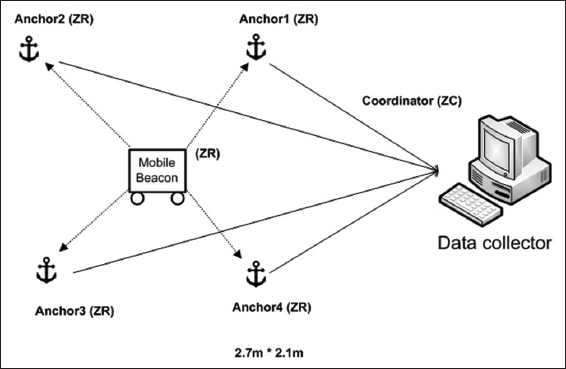
Figure 2: Hardware implementation
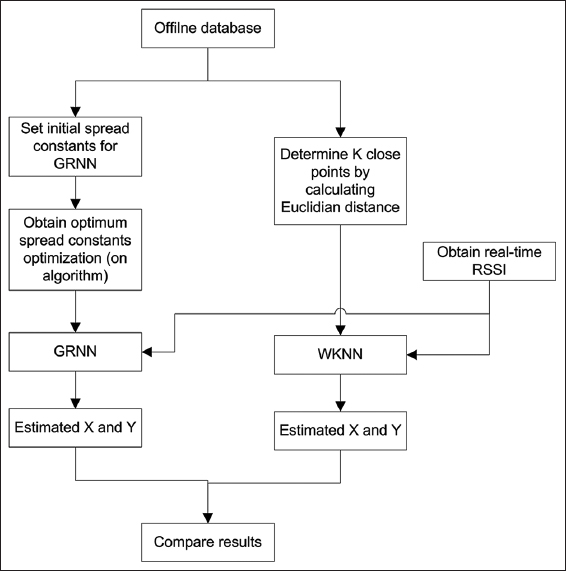
Figure 3: Experiment architecture
Sudden Environmental Changes
During the experiment, sudden changes such as opening door will drift results temporarily. RSSI will be less than usual and fingerprint map affected temporarily then return to its original state after a while. Several ways to cope with this phenomenon such as Kalman filter distance estimation,[23] another solution stopping until difference reduced a certain threshold, or by moving several centimeters exiting deep fading region. Other works suggested using radiofrequency identification (RFID) absolute positioning for better accuracy.[7,24,25]
RESULTS
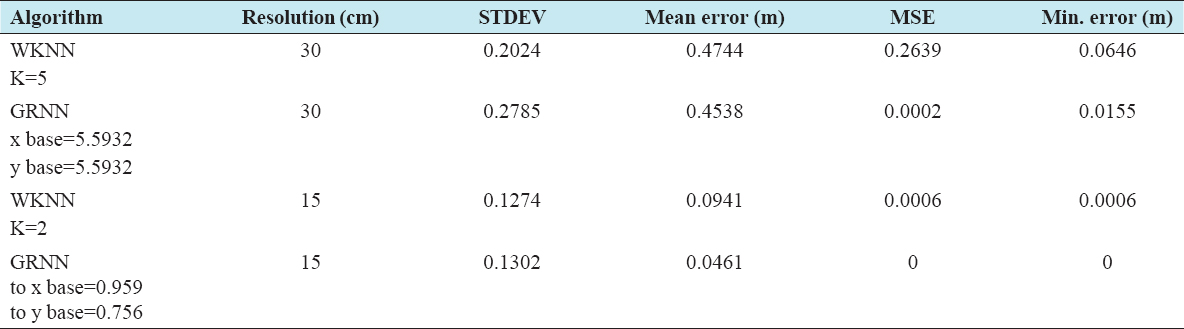
According to Table 1, GRNN shows better results with mean error (0.0461 m) compared to KNN and WKNN. Therefore, GRNN is suitable for such experiment coping with correlated RSSI readings. Accuracy measured using mean Euclidean error. Figure 4 shows convergence while increasing resolution up to 15 cm, then localization improved further (Figure 5) using GRNN in 15 cm. Figure 6 gives a visual hint about how estimated points plotted, upper part shows magnitude points representation estimation both WKNN and GRNN in 15 cm in addition to 30 cm grid resolutions. The lower part (Figure 6) shows estimated error calculated Equation 6.
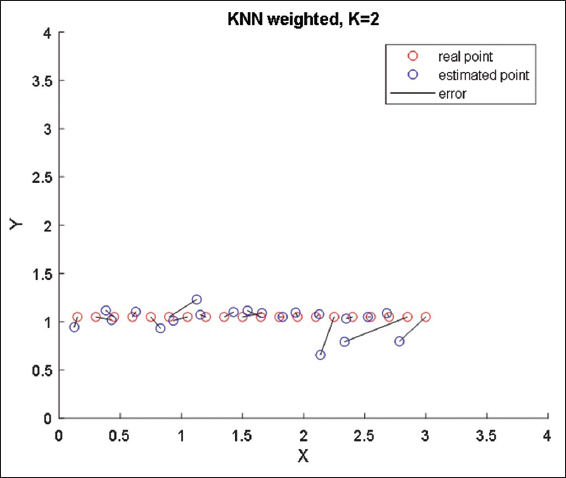
Figure 4: Reduced localization error while increasing resolution of weighted k-nearest neighbor (15 cm)
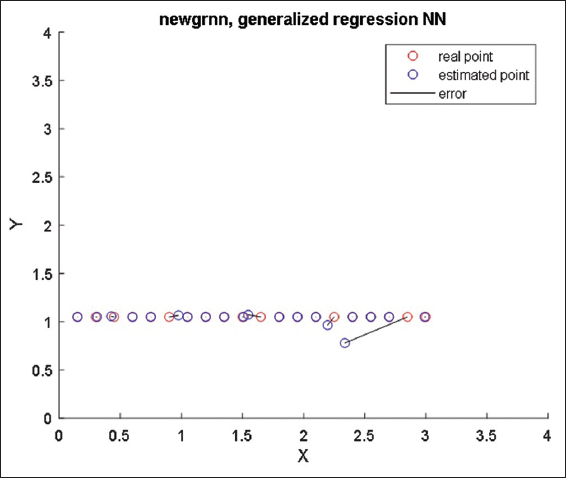
Figure 5: Further increased localization accuracy using generalized regression neural network 15 cm
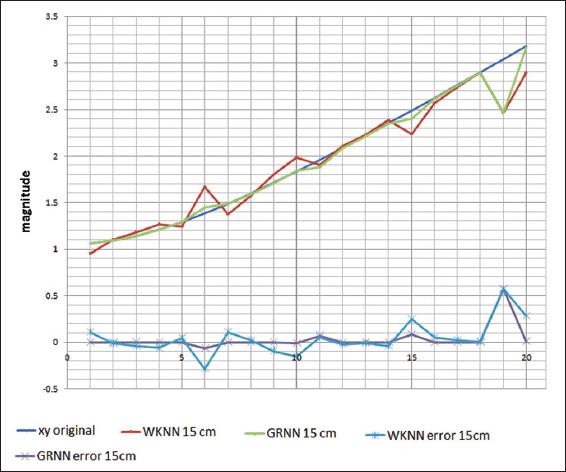
Figure 6: Localization error and Euclidean distance from origin
Table 1: Performance features
CONCLUSIONS
Indoor localization accuracy varies according to target environment and algorithm, which may impede certain techniques due to some limitations. Adapting AI approach for indoor localization is acceptable, brings accuracy, and shows a good response while increasing fingerprinting map resolution. Sudden changes could affect signal strength measurements temporarily, there are several methods handling this such as mixing with other localization techniques. Increasing finger resolution produces enhanced GRNN results. Literature stated that K mostly odd number, but in this experiment, it was K = 2 within 15 cm resolution. In addition, black line (Figure 5) brings large error in one point representing a sudden environmental change while taking experiment. This avoided either by taking several averaged measurements or GRNN fused with another technique. The overall results show GRNN brings acceptable positioning accuracy.